Embodied decisions
flanker task, motor inference, urgency modulation, habit learning
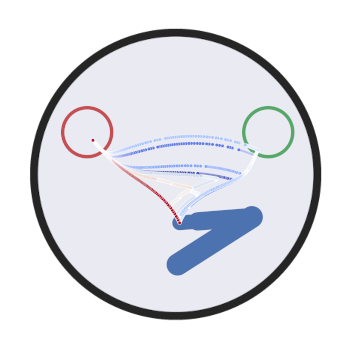
This is the project related to the papers Embodied decisions as active inference and Learning and embodied decisions in active inference . In this study, we introduce a novel modeling approach to explore embodied decision-making, where decisions and actions occur simultaneously in dynamic environments. Our model offers a new perspective on how decisions are influenced by the actions taken, highlighting the importance of considering motor control as an integral part of decision processes.
The code can be found here.
Video simulations
HowTo
Start the simulation
The simulation can be launched through main.py, either with the option -m for manual control, -e for the simulation in Figure 2, -u for the simulation in Figure 3, -d for the simulation in Figure 4, -t for the simulation in Figure 5, -s for the simulation in Figure 6, -a for the simulation in Figure 8, -l for the simulation in Figure 9, -k for the learning simulation in Learning and embodied decisions in active inference , or c for a custom configuration specified in config.py. If no option is specified, the custom simulation will be launched. For the manual control simulation, the arm can be moved with the keys Z, X, LEFT, RIGHT, UP and DOWN.
Plots can be generated through plot.py, either with the option -e for Figure 2, -u for Figure 3, -t for Figure 5, -s for Figure 6, -a for Figure 8, -l for Figure 9, or -v for generating a video of the simulation.
Advanced configuration
More advanced parameters can be manually set from config.py. Custom log names are set with the variable log_name. The number of trials and steps can be set with the variables n_trials and n_steps, respectively.
The parameter n_tau specifies the sampling time window used for evidence accumulation.
The parameter n_cues specifies number of the cues, cue_prob the cue probability for the first target, cue_sequence a custom sequence of cues.
The agent configuration is defined through the dictionary joints. The value link specifies the joint to which the new one is attached; angle encodes the starting value of the joint; limit defines the min and max angle limits.
Useful trajectories computed during the simulations are stored through the class Log in environment/log.py.
Note that all the variables are normalized between -1 and 1 to ensure that every contribution to the belief updates has the same magnitude.
References
2025
- Learning and Embodied Decisions in Active InferenceIn Active Inference, Jan 2025
2024
- Embodied decisions as active inferencebioRxiv, Jun 2024